豊作計画 - パソコン用
- カテゴリ: Productivity
- 最終更新日: 2021-07-14
- 現在のバージョン: 2.2.1
- ファイルサイズ: 86.64 MB
- 互換性: Windows PC 10, 8, 7 + MAC


あなたのWindowsコンピュータで 豊作計画 を使用するのは実際にはとても簡単ですが、このプロセスを初めてお使いの場合は、以下の手順に注意する必要があります。 これは、お使いのコンピュータ用のDesktop Appエミュレータをダウンロードしてインストールする必要があるためです。 以下の4つの簡単な手順で、豊作計画 をコンピュータにダウンロードしてインストールすることができます:
エミュレータの重要性は、あなたのコンピュータにアンドロイド環境をエミュレートまたはイミテーションすることで、アンドロイドを実行する電話を購入することなくPCの快適さからアンドロイドアプリを簡単にインストールして実行できることです。 誰があなたは両方の世界を楽しむことができないと言いますか? まず、スペースの上にある犬の上に作られたエミュレータアプリをダウンロードすることができます。
A. Nox App または
B. Bluestacks App 。
個人的には、Bluestacksは非常に普及しているので、 "B"オプションをお勧めします。あなたがそれを使ってどんなトレブルに走っても、GoogleやBingで良い解決策を見つけることができます(lol).
Bluestacks.exeまたはNox.exeを正常にダウンロードした場合は、コンピュータの「ダウンロード」フォルダまたはダウンロードしたファイルを通常の場所に保存してください。
見つけたらクリックしてアプリケーションをインストールします。 それはあなたのPCでインストールプロセスを開始する必要があります。
[次へ]をクリックして、EULAライセンス契約に同意します。
アプリケーションをインストールするには画面の指示に従ってください。
上記を正しく行うと、ソフトウェアは正常にインストールされます。
これで、インストールしたエミュレータアプリケーションを開き、検索バーを見つけてください。 今度は 豊作計画 を検索バーに表示し、[検索]を押します。 あなたは簡単にアプリを表示します。 クリック 豊作計画アプリケーションアイコン。 のウィンドウ。 豊作計画 が開き、エミュレータソフトウェアにそのアプリケーションが表示されます。 インストールボタンを押すと、アプリケーションのダウンロードが開始されます。 今私達はすべて終わった。
次に、「すべてのアプリ」アイコンが表示されます。
をクリックすると、インストールされているすべてのアプリケーションを含むページが表示されます。
あなたは アイコンをクリックします。 それをクリックし、アプリケーションの使用を開始します。
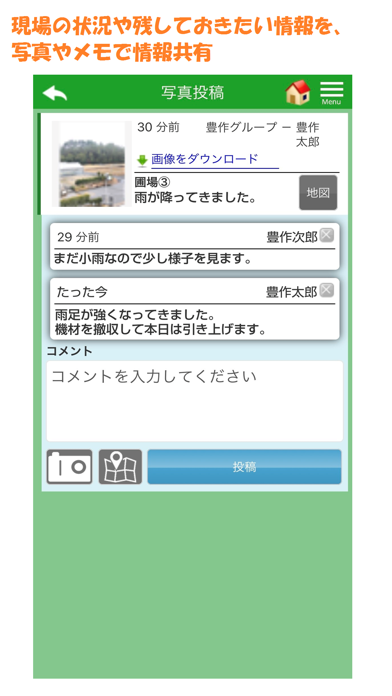
豊作計画は農業支援システム「豊作計画」をご利用いただくための作業記録アプリです。 スマートフォンで作業記録を入力することで、進捗管理やレポート出力を行うことができます。 ご利用いただくには、事前に「豊作計画」にご登録いただく必要があります。 「豊作計画」は、トヨタ生産方式の考え方を農業に応用したクラウドサービスのことで、生産者の皆様の効率的な運営をサポートするものです。 ■計画する(PC版機能) ・確実に作業を振当てることができる ・次にやるべき作業がわかる ・作業や圃場ごとに遅れ進みがわかる ■確認する ・画面を見るだけでやること、場所、状況がわかる ・遅れ進みがどこにいてもわかる ・やるべき作業と場所がわかる ・異常管理ができる ■記録する ・スマホを数回タップするだけで作業日報を簡単作成 ・作業者の負荷を軽減できる ・システム内に自動で保存、蓄積される ■振り返る(PC版機能) ・作業者、集落、時期別にデータを解析し、現場のムダや異常を簡単に発見できる ■写真・メモの投稿 ・現場の状況や残しておきたい情報を、写真やメモとして情報共有 ・仲間とリアルタイムに共有できる